1 октября, 2018 22:42
Арнайы бөлім
1 Жеке жылу орталығы (ЖЖО)
Жылу орталығы қойылатын талаптар: Жылу орнын ауа алмасумен
қамтамасыз ету қажет. Жылу орнындағы төбенің биіктігі 2,5 м — ден кем емес.
Кіріс бөлігіндегі аралықтың ені 90 см. Жылу орны ғимаратында
жылутасымалдағышты ұқыюға немесе жабдықтардан жоюға
арналған
канализация қарастырылуы керек. Жылу орны ғимаратының қабырғалары
сылақталған, едені тегістелген, шаңнан тазартылған және еденнен 10 см
биіктікте гидроизоляцияланған. Жылу орнындағы ауа температурасы +5 гр.С —
тан кем емес. Жылу орны ғимараты басқа ғимараттардан алыс орналасқан,
отқа төзімділігі 0,75с қабырғалармен қоршалған, ал конструкцияға отынның
таралу шегі нөлге тең болуы керек.
Жеке жылу орны ыстық сумен, жылумен жабдықтауға немесе әртүрлі
өндірістік кешендерді, тұрғын үй -коммуналды шаруашылық нысандарын
және тұрғын үйлерді желдеткішпен қамтамасыз етуге арналған. Жүйенің
жұмыс істеуі үшін жылутасымалдағыш пен су құбырының суын қо су керек,
сонымен қатар циркуляциялы насостарға электрэнергиясын жеткізу қажет.
Кіші жеке жылу орындары кіші құрылымдағы бір шаңырақтан тұратын
үйлерге арналған, олар орталық жылумен жабдықтау желілеріне
қосылған.Олар ГВС суларын қыздыруға және қуаттылығы
40 кВт ғимаратты жылытуға есептелген.
Үлкен жеке жылу орындары көпқабатты және үлкен үйлерге арналған.
Жеке жылу орнының қуаттылығы 50 кВт — 2 МВт.
Автоматтандырылған жеке жылу орындарының артықшылығы:
Жылу желісіндегі құбырлардың жалпы ұзындығы 2 есе азаяды.
Жылу желілеріне жұмсалатын қаржы, сонымен қатар құрылыс
және жылуизоляциялық материалдарға кететін шығын 20—25%-ға азаяды.
Жылутасымалдағышты құюға кететін электрэнергияның шығыны
20- 40%-ға азаяды.
Нақты абонентке берілетін жылуды тұндырып реттеуді
автоматтандыру арқылы жылытуға кететін жылуды 15% үнемдейді.
азаяды.
Ыстық суды тасымалдау кезіндегі жылудың жойылуы екі есе
Жылу желісін ыстық сумен жабдықтайтын құбырларды жою
арқылы желідегі апаттық жағдайлар азаяды.
Автоматтандырылған жылу орны жабық түрде жұмыс
істегендіктен, квалификацияланған қызметкерлер қажеттіліг азаяды.
Жылутасымалдағыштың желі суының, жылыту жүйесінің суы
және су құбыры суының қысымы мен темпеарутрасын, жылытылатын
ғимараттағы ауа температурасы мен сыртқы ауасы сияқты параметрлерін
бақылай отырып, автоматты түрде өмір сүру жағдайы жақсарады.
31
Әрбір ғимаратта пайдаланылған жылу арнайы қондырғымен
есептеледі және нақты өлшенген шығын бойынша төленеді.
үйдің ішкі жылыту жүйелерінде құбыр диаметрлерінің кіші
болуына байланысты, бейметалл материалдарды қолданудың әсерінен
шығындар азаяды.
Жылу үнемделеді, монтажға кететін шығындар зауытта толық
орындалғандықтан азаяды. Өзін өзі өтеу мерзімі екі жылдан аз. Жылу
энергиясы 20-30 %-ға дейін үнемделеді.
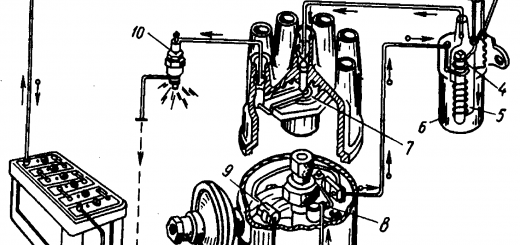
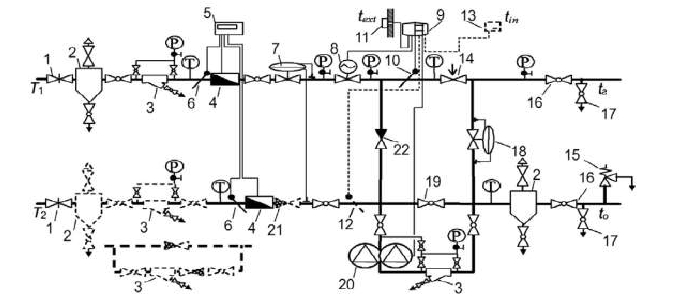
Сурет. 2.1. ЖЖО-ны таңдау бойынша негізгі техникалық шешімдер
2.1 суретте жылу орнының принциптік схемасы келтірілген. Негізгі
жабдықтардың функционалдылығын қарастырамыз.
1 – өшіретін арматура. Жылу орнына болатты тиекті арматура- арнайы
шарлы крандар немесе бұрышты жапқыштарды енгізу қарастырылған.
2 –батпақалқан; 3 – фильтр. Эксплуатация талаптары бойынша көптеген
автоматты жабдықтарға сапалы жылутасымалдағышты пайдалану қажет.
Мұндай мәселені қатты бөлшектерден тұратын дәстүрлі гравитациялы
тұнбалар шеше алмайды. Сондықтан батпаққалқаннан кейін торлы фильтрді
орнату қарастырылады. Қысымның төмендеуі бойынша фильтрді тазалау
қажеттігін анықтау үшін манометрлер қарастырылған.
Батпаққалқанды орнату орны –жылу орнын енгізу кезінде өткізілетін
құбырларға; кері құбырларға су мен жылу ағындарының шығындарын ескере
отырып насостың және қондырғылардың алдына орнатады. Батпаққалқан мен
фильтрді насос алдына орната отырып жылыту жүйесін ластанудан — болатты
құбырлардың тотықтанудан, жылдар бойы шойынды радиаторлардан
тазартылатын қалыптау массасынан қорғайды.
4 – шығын өлшегіш. Жылумен жабдықтайтын ұйымдардың талаптары
бойынша шығын өлшегіштерді жеткізетін және кері құбырларға бір уақытта
32
екі құбырлы немесе бір, төрт құбырлы жылумен жабдықтау жүйесінде орнату
қарастырылған.
5 – жылу есептегіш. Шығын өлшегіште 4 өлшенге шығын мен бу
датчигіндегі 6 әртүрлі температура негізінде, пайдаланылған жылу
энергиясын есептейді
6
–
жылутасымалдағыш температурасының датчигі.
Жылутасымалдағыш температурасына пропорциялы түрде қарсы өзгеретін,
қарсылық термометрінен тұрады. Бұл үшін платиналы өткізгіштерді
пайдаланады, олар сызыққа байланысты болады.
7 – қысым айырма реттегіш (ҚАР). Жылу желісін гидравликалық қайта
реттеуден қорғайды. Жылыту жүйесін жылу желісіндегі қысымның
тербелісінен қорғайды. Қысым айырмасын ұстап тұрады және жылу ағынын 8
реттегіштің клапанында тұрақты сыртқы беделін ұстап тұрады, реттеуге
ыңғайлы жағдай жасайды. 8-бен бірлесе отырып, абоненттегі
жылутасымалдағыштың максималды шығынын шектейді. Клапанның 8
электржетегінің механикалық жұмысқа қабілеттілігімен қамтамасыз етеді.
Егер реттегіш 7 жоқ болса, жылу желісіндегі қысымның тербелісі реттегіш
жетегіне 8 беріледі, ол оның жұмысқа қабілеттілігін нашарлайды. Нашар әдіс
жетектің көмегімен құбырдағы қысымды арттыру. Егер жетекте осы уақытта
өшіретін қорғанысы болмаса, ол жанады немесе бұзылады. Жетектерде
шамадан тыс күштерден қорғайтын функция бар. Пайдаланылатын клапандар
электр қуаты жойылғанда бекітпеде уақытша орналасады.
8
–
жылу ағынын реттейтін клапан. Жылу желісінен
жылутасымалдағыштың берілуін суық жылутасымалдағышпен аралстыру
үшін өзгерте отырып, жылыту жүйесінің кіріс бөлімінде
жылутасымалдағышқа қажетті температурамен қамтамасыз етеді. Клапан
электр жетегімен реттеледі, ол электронды реттегішпен басқарылады.
9 – электронды реттегіш . температура датчигі 10 бойынша жылыту
жүйесінің кіріс бөлімінде жылутасымалдағыштың температурасын басқарады.
Реттеуді бағдарланған температуралы график бойынша сыртқы ауа
температурасының көрсеткіштері мен сыртқы ауа температурасының
датчиктерінің көрсеткіштерін 11 салыстыра отырып, сонымен қатар
бағдарланған энергияны үнемдейтін тәртіппен-жылыту жүйесінің түнде
энергияны тұтынуын азайту, демалыс күндері энергияны тұтынуды азайту
арқылы жүзеге асырады. Кері құбырдағы жылутасымалдағыш температурасы
бойынша басқаруды температура датчигінің көрсеткіштеріне 12 немесе
бөлмедегі ау температурасы бойынша ішкі ауа температурасының датчигіне
13 сәйкес түзейді. Берілген датчиктер бойынша реттеу басым болады.
Жылыту периодында жүйені реттеуден басқа, электронды реттегіш
жылытылмайтын периодта жылу ағынының реттегіш клапаны штогына
жабысуының 8 және насос білігінің 20 жабысуының алдын алады, оларды
периодты түрде аз уақытқа (үш тәулікте бір рет бір минутка) қосып отырады.
Бұл функциялар қосымша опция болып табылады және электронды реттегішті
бағдарлау арқылы жүзеге асырылады. Мысалы, насосты эпизодты қосуды кез
33
келген жылыту жүйесінде жүзеге асыруға болады. Сонымен қатар жылу
ағынын реттегішті эпизодты түрде қосу. Насос және клапанды сәйкес қосу
арқылы жылутасымалдағыштың қосымша шығынын минималдайды.
10 және 12 – жылутасымалдағыш температурасының датчигі. 6
датчиктің сипатына ұқсас. 10 датчикті кіші айналмалы сақинаға орнату қажет
– кері клапаны бар қосқыштар арасы 22 мен іске қосу клапандары 18. Бұл
жылыту жүйесінің кіріс бөлімінде кез келген жұмыс тәртібінде
жылутасымалдағыштың температурасын қабылдауға мүмкіндік береді.
Қосымша датчиктер тез әрі нақты реттеуге жағдай жасайды. Екі
датчикті орната отырып, жылыту жүйесінде қосымша өлшеу құралдарын
қолданбай ак температураны жөндеу әдісін қолдануға мүмкіндік алады,
өйткені құбырдағы жылутасымалдағыштың температурасы электронды
реттегіштің дисплейінде 9 көрсетіледі. Температуралы әдіс жылыту жүйесі
қуаттылығының ғимараттан жойылатын жылуға сәйкестігін көрсетеді.
Жүктемелі және үстемелі датчиктерді қолдану қарастырылған.
Үстемелер – кіші диаметрлі құбырларға орнатылады. Мұндай датчиктер
арзан және аз инерциялы болып келеді.
11
–сыртқы
ауа температурасының датчигі . Сыртқы ауа
температурасына пропорциялы түрде қарсы өзгеретін, қарсылық
термометрінен тұрады. Бұл үшін платиналы өткізгіштерді пайдаланады, олар
сызыққа байланысты болады, кабель ұзындығына байланысты аз өзгереді.
Оны терезе, есіктерге жылу ағыны әсер бермейтін етіп, ғимараттың сыртқы
қабырғасының сол жағына орнатады.
13 – ішкі ауа температурасының датчигі . Ішкі ауа температурасына
пропорциялы түрде қарсы өзгеретін, қарсылық термометрінен тұрады. Бұл
үшін платиналы өткізгіштерді пайдаланады, олар сызыққа байланысты
болады, кабель ұзындығына байланысты аз өзгереді. Датчикті температуралы
тәртіппен сипатталатын ғимарат бөлмелеріндегі ішкі қабырғалардың біріне
орнатады.
16 – жылыту жүйесінің өшіру арматурасы. Жылыту жүйесін өшіруге
және жүйені жуу кезінде жылу түйінінің жабдықтарына ластанған
жылутасымалдағыштың түсуінен сақтауға арналған.
17 – түсіру крандар. Жылыту жүйелерін босатуға арналған. Сонымен
қатар жылыту жүйесін жуу кезінде компрессорларды қосу үшін, ал кіші
жүйелерде-гидравликалық сынақтар үшін қолданады.
20
–
насосты топ. Жылыту жүйесінде жылутасымалдағыштың
айналымын жүзеге асырады.
Сенімділікті арттыру талаптарына сай тәулігіне 12 сағаттан ауыспалы
түрде жұмыс істейтін 2 насосты орнату қарастырылған, өйткені қарапайым
ұзақ жұмыс істейтін насос жарамсыз. Сонымен қатар бір насостың үздіксіз
жұмыс істеуіне жол берілмейді, өйткені ол шамадан артық жұмыс істеп
жарамсыз болып қалуы мүмкін. Насостың жұмыс тәртібі электронды
реттегішпен орнатылады 9.
34
22 – кері клапан. Жылутасымалдағыштың жылу желісіндегі жеткізу
құбырларынан кері құбырларға өтуінің алдын алады
Жылуесептегіш — бұл жылумен жабдықтаудың сулы жүйесіндегі жылу
энергиясы мен жылутасымалдағыш параметрлерін тіркеу және өлшеуге
арналған құрал.
Жылуесептегіш бір сағатта, бір бәулікте құбырдан өткен су,
температура және қысым көлемін тіркейді. Нәтижелерді бірнеше каналда
тіркейді, олар -жылыту, ыстық сумен жабдықтау жеткізу және кері құбырлар
бойынша және суық сумен жабдықтау. Жиналған көрсеткіштердің негізінде
тұтынылған жылу, жұмыс уақытының мөлшерін есептейді, әртүрлі штатсыз
жағдайларды тіркейді.
Жылуесептегіш әрбір құбырға орнатылған шығын өлшегіштер,
температураны түрлендіргіштер мен қысым ды түрлендіргіштер жинағымен
жұмыс істейді.
Жылуесептегіш жиналған және есептелген нәтижелерді, техникалық
анықталған белгілі уақыт мөлшерін сақтайды және оларды белгілі форматта
электронды немесе басып шығарылған түрде бере алады.
2 Жеке жылу орталығында температураны реттеу контурыының
технологиясы.
Температура контурын автоматтандыру жылу энергиясын сыртқы
ауаның өзгеруіне байланысты тиімді пайдалануға, авария болар алдын
бақылап және апат болған кезде тез арада шаралар қолдануға және жылу
тасымалдағыштың температурасын сапалы түрде реттеуге арналған.
Жеке жылу отралығын автоматтандырудың атықшылықтарын қарайтын
болсақ
А) Апатты жағдайлардың аз болуы және болған жағдайда тез арада көрп
жөндеу.
Б) Құрылғылардың көп функциялды болуы : бір датчиктен алыған
сигнал көптеген мақсатпен жұмсалуы; мыслаға қысым датчигінен алынған
сигнал келесі жағдайларда қолданылуы мүмкін : авариялық -үлкен қысым ,
жүйеінің бір жеріндеіг ауаның жиналуы, насостың бос жүрісі және т.б.
В) Шеттегі құрылғылардың кез — келген стандарты немесе стандарты
емес мінездемелермен қолдану мүмкіншіліктері , құрылғылардың оңай
ауыстыру (датчиктер, механизмдер және т.б).
Г) Реттеу алгоритмін схеманы көп жірлерін өзгертпей жеңіл алматыру.
Д) Жеке жылу орталығын тек бір ғана реттеуіштің басқаруы. Ол
экономикалық жағынан тиімді және жеңіл реттеліп отырады.
Е) Реттеуіш барлық жабдықтың және тәртіптердің толықтай
диагностикасын жасайды.
35
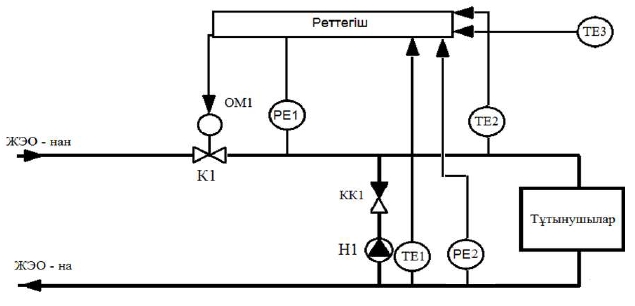
2.2-сурет температураны реттеу контурының технологиялық схемасы.
2.2-суретке қарайтын болсақ, жылуэлектр орталығында 150
– қа
дейін қыздырылған жылу тасымалдағыш
жылу орталығна келіп K1
клапанынан құбыр арқылы өтеді, кірісте жылу тасымалдағыш 6 атм мен кіріп,
тұтынушылардан шыққанда температурасы 70
және қысымы 4 атм -ға
төмендейді . Н1 айналдыру сорғысы көмегімен қысымы 4 — атм азайған жылу
тасымалдағышқа 2 -атм қосып процессті қайтадан айналдырады. КК1 кері
клапан арқыы айналу процессіне кеткен жылу тасымалдағыш араластыру
тармағында ЖЭО -нан келген жылутасымалдағышпен араласаып қайтадан
тұтынушыларға барады.
Тұтынушылардан шыққан жылу тасымалдағыштың температурасын
ТЕ1 ;және қысымын РЕ2 өлшеп сигналды реттеуішке береді, ал ЖЭО — нан
келген кірістегі жылу тасымалдағыштың температурсын ТЕ2 және қысымын
РЕ1 өлшеп реттеуішке сигнал береді. ТЕ3 сыртқа ауа температурасын
өлшейтін датчик. Реттеуіш ТЕ1 және ТЕ3 температураларына байланысты
ОМ1 орындауша механизміне сигнал беру арқылы клапанды ашып,
жабыңқырау арқылы кірістегі ТЕ 2 температурасын реттеп отырады.
36
2.1 Температураны реттеу контурына құрылғыларды таңдау.
2.1 к е с т е – Датчиктердің салыстырмалы анализі
2.2 к е с т е – Орындаушы механизмнің салыстырмалы анализі
2.3 к е с т е – Реттеуіштің салыстырмалы анализі
37
| Құрылғы
атауы |
Құрылғы
типтері |
Өлшеу
диапазоны |
Таңдалынғ
ан құрылғы |
| Қысым
датчигі |
ДЕ-57-1600 | 2,6; 1,8; 1,1;
0,8; 0,6; 0,5; 0,3; 0,15 МПа |
+ |
| XP600
FONDITAL |
100; 60; 40;
25; 16; 10; 6; 4 МПа |
— | |
| Кірістегі
температура датчигі |
THB100 | о
5 С — +150 о С |
+ |
| TM-100 | о
-50 С — +30 о С |
— | |
| Сыртқы ауа
температура датчигі |
TM-100 | о
-50 С — +30 о С |
+ |
| THH100 | о
33 С — +110 о С |
— | |
| Шығыстағы
температура датчигі |
THH200 | о
3 С — +110 о С |
+ |
| THB200 | о
5 С — +150 о С |
— |
| τ/Т қатынасы | Объект
сипаттамасы |
Реттеу заңдары |
| 0< τ/Т <0.05 | Кешігусіз | Релелі,үзіліссіз
П,ПИ,ПД,ПИД реттеуіш |
| 0.05< τ/Т <0.1 | Үлкен
инерциямен және аз кешігумен |
Релелі,үзіліссіз
П,ПИ,ПД,ПИД реттеуіш |
| 0.1< τ/Т <0.2 | Кешігумен | Релелі,үзіліссіз
П,ПИ,ПД,ПИД реттеуіш |
| Құрылғы
атауы |
Құрылғы
типтері |
Номиналды
толық жүріс,с |
Таңдалынғ
ан құрылғы |
| Орындауш
ы механизм |
PN-25 | 7сек | + |
| PN-40 | 10сек | — | |
| PN16 | 11 | — |
2.4
кесте
–
ДЕ-57-1600
су
қысымы
датчигінің
техникалық
сипаттамасы
2.5 к е с т е – THB100 температура датчигінің техникалық сипаттамасы
38
| Параметрлері | Мәндері |
| Жоғарғы
өлшеу шектері |
2,6; 1,8; 1,1; 0,8; 0,6; 0,5; 0,3; 0,15 МПа |
| Өлшеу
қателігі |
±0,15 % |
| Қорек кернеуі | 24-36 В тұрақты тоқта, 55 Гц-тен 410 Гц-ке
дейін |
| Қолдану
қуаты |
0,7 В·А |
| Бақылау
ортасы, тип |
Су |
| 0.2< τ/Т <0.4 | Кешігумен | Үзіліссіз немесе
цифрлы ПИ,ПД,ПИД реттеуіш |
| 0.4< τ/Т <0.8 | Кешігумен | Үзіліссіз немесе
цифрлы ПИ,ПД,ПИД реттеуіш |
| 0.8< τ/Т <1 | Үлкен кешігумен | Үзіліссіз немесе
цифрлы ПИ,ПД,ПИД реттеуіш |
| τ/Т >1 | Үлкен кешігумен | Цифрлы реттеуіш |
| Параметрлері | Мәндері |
| Жоғарғы
өлшеу шектері |
о о
5 С-+150 С |
| Өлшеу
қателігі |
±0,1 % |
| Бақылау
ортасы, тип |
Су |
2.6 к е с т е – TM-100 сыртқы ауа датчигінің техникалық сипаттамасы
2.7 к е с т е – PN-25 орындаушы механизмнің техникалық сипаттамасы
Н
оминал
ұмыс
Ж
Но
миналды ц
50Г
Пай
далынаты
Ө
лшемі,
ды
жасау
қысым,
жиілігінде н қуат, мм
айналу
ортасы
PN гі
В·А
момент
і, Н·м
темпер
атурас
о
MПа(
кг/см2)
кернеу,В
4
—
1,6
220
60
2
0
15 ден (16)
+220
00х185
х250
Электронды реттегіш
Температураны реттегіштер немесе сериясы ECL comfort ауа райының
компенсаторы электронды ұқсас бір каналды температураны реттегіш болып
табылады. Олар сулы жүйемен жылытылатын автономды жылу генераторлы
ғимараттың, сонымен қатар насосты араластыру түйіні немесе су жылытқышы
бар орталық жылумен жабдықталған ғимараттарда қолданылады. Басқару
нысаны жылутасымалдағыш ағыны болып табылады. Жылутасымалдағыш
ағынын басқару аспабы жылутасымалдағыш құбырындағы реттегіш клапаны
немесе жылыту жүйесіндегі циркуляционды насос болып табылады. ECL
comfort температураны реттегіштің көмегімен жылыту жүйесіне түсетін
жылутасымалдағыштың температурасы сыртқы ауаның температурасына
пропорционалды түрде орнатылады. Жылыту жүйесінің кіріс бөлігіндегі
жылутасымалдағыштың температурасы мен сыртқы ауаның температурасы
реттегішке жылутасымалдағыш температурасының датчигі мен сыртқы ауа
температурасының датчигінен сәйкесінше түседі. ECL comfort температураны
реттегішті жинақтау кезінде апталық таймермен бағдарланған
жылутасымалдағыш температурасының өзгерісін білуге болады, сәйкес
бөлмедегі тәулік бойы және аптаның әрбір күніндегі ауа температурасын
білуге болады. ECL comfort температураны реттегіш сыртқы ауа
температурасы берілген мәннен асып кетсе, жылыту жүйесін автоматты түрде
өшіреді. Осы уақыт аралығында реттегіш үздіксіз түрде насосты және
клапанды реттейтін электржетегін қосады. Осы периодта реттегіш
39
| Параметрлері | Мәндері |
| Жоғарғы
өлшеу шектері |
о о
-50 С — +30 С |
| Өлшеу
қателігі |
±0,12 % |
| Бақылау
ортасы, тип |
су |
ы, С
бағдарламасы бойынша жылыту жүйесі қатаюдан қорғалады. Бірнеше
реттегіштердің сыртқы ауа температурасының датчигімен бір жүйеге бірігуі
мүмкін. ECL comfort температураны реттегіштер кейбір зауыттағы
параметрлерді өзгертуге мүмкіндік береді.
3
Нысанның
автоматтандырылуы
ретіндегі
процесстің
сипаттамасы
2.3.1 ЖЖО кешені – реттеу нысаны ретінде
Реттеу нысаны ретінде ЖЖО кешені жоғары инерттілік, кіріс және
шығыс айнымалылары мөлшерінің көптігі, олардың өзгерісінің
корреляциялығы және күрделілігімен, кері әсерлермен сипатталатын үздіксіз
процесс болып табылады. ЖО кешенінің аясында келесі негізгі
технологиялық процесстерді бөлуге болады: тұтынушыларға
жылутасымалдағышты жеткізу, ыстық сумен жабдықтау,
жылутасымалдағышты тасымалдау. Сәйкес мысал 2.1 суретте келтірілген.
ЖЖО технологиялық процессін басқару нысаны сияқты талдай отырып,
келесі ерекшеліктермен сипаттаалатындығы анықталады:
1) Жылутасымалдағышты жеткізу, ғимараттағы жылутасымалдағыштың
циркуляциясы сияқты негізгі технологиялық операциялардың үздіксіздігі
2) Процесстің көп өлшемділігі, кіріс және шығыс ауыспалылары
мөлшерінің көптігімен сипатталады.
3) Процесстің тұрақсыздығы, жылутасымалдағыш температурасының
өзгеруімен, ғимарат және құбырдың сыртқы температура қатынасының
өзгеруімен, ауа райы жағдайының әсерімен түсіндіріледі.
4) температураның орташа мәнінен ауытқуы және процесске кездейсоқ
кері әсер беретін кері әсердің стохастикалық сипаты.
5) Кіріс және шығыс процесстерінің арасындағы уақытша кешігу, ол
жоғары инерттілігі және нысандарына кешігуімен түсіндіріледі, олардың
мөлшері нысанның бөлек каналдары үшін әртүрлі болады.
40
2.3 –сурет. Технологиялық процесстер
ЖЖО процесін реттеу нысаны ретінде схемалы түрде 2.2 суретпен
көрсетуге болады.
Реттеу нысанының схемасында мыналар көрсетілген: кіріс реттеу
әсерлерінің
векторы–
U; кіріс әсерлерінің векторы
–
V; кіріс
айнымалыларының векторы – X.
Вектор V (V1, V2, V3, V4) келесі компоненттерден тұрады: V1 – ЖЖО
кірістіге жылутасымалдағыштың температурасы (С ); V2 –сыртқы ауа
температурасы (С ); V3 – ЖЖО шығысындағы жылу тасымалдағыш
температурасы (С ); V4 – жеке жылу орталығындағы қысым мөлшері (Pa).
Вектор U (U1, U2) мыналардан тұрады: U1 – жылутасымалдағыш
шығыны; U2 – қысым мөлшері.
U
V1
V2
U1
U2
X1
X2
V
.
V3
V4
X
.
X6
2.4 – сурет. ЖЖО процесін реттеу нысаны
Вектор Х (Х1,) мыналардан тұрады: Х1 –процесс температурасы (0 С).
Осылайша, ЖЖО процессі көптеген кіріс және шығыс айнымалылары
бар, көп өлшемді, көп байланысты реттеу нысанына жатады.
41
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2.3.2 ЖЖО кешенін автоматтандырудың ерекшелігі
АРЖ ТП құрудың негізгі ерекшелігі , ол бірегей жүйе АРЖ-нің
элементі ретінде құрылуы керек, сондықтан ол қазіргі таңда бар жүйелердің
интеграциясын қарастыруы керек.
4 ТП АРЖ құрудың мақсаты мен тағайындалуы
ТП АРЖ тағайындалуы автоматтандырылған бақылау мен тұрғын үй
ғимараттарын жылытудың технологиялық процесстерін басқаруға арналған
бағдарлы-техникалық кешен болып табылады, олардың функцияларына
мыналар кіреді:
— айнымалылар туралы мәліметтерді жинау және өңдеу, ол басқару
нысанының жағдайын, автоматты реттейтін локальді жүйелердің
функцияларын жүзеге асыру мен берілген технологиялық тәртіптерді
тұрақтандыру сияқты технологиялық процесстер операторының
компьютерлеріне жекізуді сипаттайды;
— технологиялық агрегаттарды дистанционды басқару;
—
басқарылатын нысандарды функциялау туралы мәліметтерді
графикалық, сандық, мнемоникалық түрде бейнелеу;
— алдын ала ескерту және апатты жағдайдағы сигнализациялар;
Автоматизацияның нысаны жылутасымалдағыштың берілуін реттейтін
клапан және насостан тұратын, технологиялық қондырғылардың жинағы
болып табылады.
Тиімді жылумен басқаруды енгізгенде ғимаратта қажетті
температураны ұстап отыру керек. Бұл үшін температуралы графикті ескере
отырып, жылудың берілуін реттеп отыру керек. Сыртқы ауаның
температурасын өлшейтін датчиктер бір немесе бірнеше жылытылатын
бөлмелерге орнатылады және олар берілген температурадан ауытқулар болған
жағдайда іске қосылады.
2.4.1 ТП АРЖ функциялары
АРЖТП-ны құру кезінде жүйені функциялаудың нақты мақсаттары
мен өндірісті басқарудың жалпы құрылымында тағайындалуы
анықталуы қажет.
Мұндай мақсаттарға мыналар мысал бола алады:
— отын, материал және басқа да өндірістік ресурстарды үнемдеу;
— нысандарды функциялау кезінде қауіпсіздікпен қамтамасыз ету;
— еңбек күшінің шығынын азайту;
— жабдықтарды тиімді пайдалану;
— технологиялық жабдықтардың жұмыс тәртібін оңтайландыру.
Қойылған мақсаттарға жүйедегі функцияларды орындай отырып қол
жеткізеді.
АРЖ мыналарды жүзеге асырады:
— УПСВ технологиялық жабдықтардың параметрлерін автоматты түрде
42
өлшеу (насосты агрегаттардағы температура мен қысымның деңгейі, отын
шығыны);
— өлшенген мәндерді технологиялық параметрлердің мәндерімен
салыстыру, басқару сигналдарын, сонымен қатар алдын ала ескертетін және
апатты сигнализацияларды қалыптастыру;
— барлық технологиялық нысан бойынша сұйықтық балансын есептеу;
— насосты агрегаттар жағдайын бақылау, апатты жағдайларда апатты
сигналдардың өшуін қалыптастыру;
— технологиялық процесстерді мнемосхема, индикатор, тренд түрінде
бейнелеу, негзгі технологиялық параметрлердің хронометрлі қағазсыз
технологиясын жүргізу және оқиғаның протоколын қалыптастыру;
— оператор-технологтың (АРМ) автоматтандырылған жұмыс орнындағы
пультпен кесу жабдықтары мен арматураны реттегішті басқару, сонымен
қатар реттеу қондырғыларының өзгеруін басқару;
— қосу-реттеу жұмыстары өндірісінде саты бойынша қосу мүмкіндігі;
—
екпінсіз автоматты реттегіштен қолмен реттегішке ауысуы немесе
керісінше;
— АРЖ компоненттерінің және компоненттер мен шынжырлардың ақауы
кезінде берілетін сигнализацияны өздігімен бақылау.
Сәулет жағынан АРЖ иерархиялы принцип бойынша құрылады және
төменгі, орташа және жоғарғы деңгейден тұрады.
2.4.2 ТП АРЖ құрылымы
Төменгі деңгей — бұл датчиктердің, өлшегіш түрлендіргіштер мен
атқарушы қондырғылардың деңгейі, олар технологиялық жабдықтарға
орнатылған.
Орта
механизмдермен басқаруға арналған басқару әсерлерін
қалыптастыру деңгейі. Орташа деңгей технологиялық процесстерді басқаруға
және берілген функциялау алгоритмдеріне, апаттан қорғау жүйелері мен
сигнализациясына сәйкес жабдықтауға мүмкіндік береді. Осы деңгейдегі
жабдықтар бағдарланатын бақылаушылар базасында жүзеге асырылады, олар
төмендегілермен қамтамасыз етеді:
— ұқсас мен дискретті сигналдарды енгізу;
— басқару сигналын беру;
— жоғарғы деңгейдегі ПЭВМ-нен алынатын бағдарламаларды аяқтау.
Жоғарғы деңгей — оператор-технологтың АРМ деңгейі, келесілерден тұрады:
— Pentium III процессорларымен бірге компьютерлері бар базадағы
операторлы станциялар, 1 немесе 2 монитор және клавиатурасымен;
— басып шығару қондырғысы мен дыбысты сигнализация.
Оператор-технологтың АРМ деңгейі
—
техникалық процесстерді
басқарудың бағдарлы-техникалық құралдар кешені, ол стандартты SCADA-
өндірістік автоматизациясының жүйесі негізінде жасалған.
SCADA – мәліметтерді жинақтау мен диспетчерлі басқару жүйесі.
Таралған басқару жүйесіндегі технологиялық процесстерді визуалдауға,
43
сонымен қатар диспетчерлі басқару мен мәліметтерді жинақтау құралдарын
жасауға арналған операторлы интерфейстерді жасайтын бағдарлы құралдар
пакетінен тұрады. Бұл пакеттер графикалық түрде және нақты уақыт
масштабында технологиялық процесстерді динамикалық нысанды-бағдарлы
графиктердің көмегімен бейнелеуге мүмкіндік береді.
2.4.3 ТП АРЖ -ны техникалық қамтамасыз ету
Жүйені функциялау үшін серверлі технология клиенті базасында
Profibus DP пайдалана отырып, желіге біріккен бірнеше ЭВМ-нан тұратын
кешен қажет. Қажетті кешеннің құрамы:
— Алынған жүйе сервері, ол жүйенің төменгі деңгейіндегі бағдарламалы
бақылаушылармен мәліметтерді айырбастауға мүмкіндік береді, мұнда
жүйедегі мәліметтер негізі жинақталады. Сервер оператордың жұмыс орны
ретінде пайдаланылмайды.
—
Операторлардың жұмыс орындарындағы ЭВМ технологиялық
процесстер туралы мәліметтерді беру мен механизмді басқару бойынша
командаларды қабылдауды қамтамасыз етеді. Сұранысы бойынша барлық
қажетті мәліметтерге қол жеткізе отырып, жүйе серверінің клиенті болып
табылады. Жүйе серверге операторлардың 16 жұмыс орындарын қосуға
мүмкіндік береді.
— Жүйе сервері мен желі Profibus DP базасындағы операторлардың
жұмыс орындары арасындағы мәліметтерді айырбастау құралдары.
— Нысанда кенеттен электрэнергиясын өшірген жағдайда ЭВМ-ді
бағдарламамен қамтамасыз ету және мәліметтердің өшіп немесе бұзылып
қалуының алдын алуға арналған үздіксіз қоректендіргіш қайнар көзі. Нысанда
жүйенің жұмысын тоқтату және ЭВМ-ді дұрыс өшіру үшін қоректендіргішті
өшіргеннен кейін 15 минут аралығында ИПС кешенді жұмыспен қамтамасыз
етуі керек.
Сервер жүйесінің ЭВМ-і келесі сипаттамаларға ие болуы керек:
— процессор P-III (төмен емес), тактілі жиілік 700 МГц (төмен емес);
— ОЗУ сыйымдылығы 512 Мбайт ;
— винчестер сыйымдылығы 20 Гбайттан кем емес;
— дисплей VGA рұқста етілуі 640х480, 256 түстен тұрады;
— тышқан;
— бағдараламалы бақылаушылармен Siemens мәліметтерді айырбастауға
арналған СР5613 картасы;
— Profibus 100/10 Мбит/сек желісі бойынша мәлімметермен айырбастау
картасы.
— АЦПУ.
Сервердің ПЭВМ-і жазылған версиясы Runtime немесе Full, 128 тегке
лицензиясы бар, визуалды жүйеден WinCC тұруы керек және ПЭВМ
қоректенгішті қосқанда оның іске қосулуы үшін автоматты түрде іске қосуды
қамтамасыз ету керек.
44
Технологиялық параметрлер мен жабдықтардың жағдайы туралы
мәліметтерді қабылдауға, сонымен қатар механизмдерді басқару бойынша
командаларды беруге арналған бақылаушысы бар сервермен байланыс
орнатылуы қажет.
Оператордыі жұмыс орнындағы ЭВМ келесі сипаттамаларға ие болуы
керек:
— процессор P-III (төмен емес), тактілі жиілік 700 МГц (төмен емес);
— ОЗУ сыйымдылығы 128 Мбайт (төмен емес) ;
— винчестер сыйымдылығы 10 Гбайттан кем емес;
— дисплей SVGA рұқста етілуі 1024х768, 256 түстен тұрады;
— тышқан;
— Profibus 100/10 Мбит/сек желісі бойынша мәлімметермен айырбастау
картасы.
Сервердің ПЭВМ-і жазылған версиясы Runtime немесе Full, 128 тегке
лицензиясы бар, визуалды жүйеден WinCC тұруы керек және ПЭВМ
қоректенгішті қосқанда оның іске қосулуы үшін автоматты түрде іске қосуды
қамтамасыз ету керек.
5 Жүйеге қойылатын талаптар
2.5.1 Автоматтандырылған функцияларды сипаттау
Жүйе бойынша орындалатын бақылау және ТП кешенімен басқару
функциялары бағдарлы-техникалық кешенмен жүзеге асырылады, шартты
түрде бұл функциялар жүйенің иерархиялық деңгейімен бөлінуі мүмкін.
Функцияның төменгі деңгейінде жүйелер Simatic S7-400 бақылау
кешендерінде жүзеге асырылады және мыналардан тұрады:
I Басқару нысанының нақты жағдайы туралы мәліметтерді алу
мақсатында мәліметтерді жинайды және өңдейді.
Кіріс және шығыс бөліктегі басқару ауыспалыларын бақылау датчик
негізінде жүзеге асырылады, олардың тізімі қосымшада келтірілген, басқару
нысаны туралы мәліметтер жоғарғы деңгейге жіберіледі. Басқару нысанының
жағдайын нақты бағалау үшін берілген функция алынған мәліметтердің
нақтылығын бағалау мәселелерін шешетін, пайдалы сигналдарды
фильтрлейтін, масштабтайтын, технологиялық өлшемдерге ауысуға мүмкіндік
беретін нақты уақыт масштабында бағдарламалы модульдермен орындалуы
керек. Бағдарламалы модульдерді іске қосу периоды технологиялық
процесстердің динамикалық қасиеттерімен анықталады.
Атап өту қажет, үздіксіз автоматты ауыспалы өлшемнен басқа, жұмыс
станцияларында технологиялық қызметші штейн мен қожыны химиялық
талдау, балқу температурасын бағалау (тепловизор мәліметтеріне сәйкес
немесе басқа да өлшеу қондырғылары негізінде), қаныққан буды талдау
нәтижелерін енгізу туралы мәліметтерді жинауы керек.
II Локальді жүйедегі автоматты реттеу және берілген технологиялық
тәртіптерді тұрақтандыру функцияларын жүзеге асыру.
45
ТП бойынша келесі реттеу контурлары қарастырылады:
— Жылутасымалдағыш шығынын тұрақтандыру;
— ЫСҚ шығынын тұрақтандыру;
— сыртқы температура/ су құбырындағы температура қатынасын реттеу;
— кіріс арматураны реттеу;
— кері клапанды реттеу
III Жабдықтың жағдайын бақылау.
Трактті жабдықтарды қосу, жылыту жүйесінің циркуляционды,
центрден тартқыш насостарын, қоректенгіш және циркуляционды
насостардың жағдайын бақылау қарастырылған.
IV Жүйенің жоғары деңгейінде басқарылатын нысанның жағдайы
туралы мәліметтерді қалыптастыру және табыстау.
Бақылау жүйесінің жоғарғы деңгейіндегі функциялар мен ТП кешенін
басқару жұмыс станцияларында (технологтар мен операторлардың АРМ-
дары). жүзеге асырылады. Жүйенің жоғарғы деңгейіне тиісті функциялар
жұмыс станцияларындағы операторлармен басқарылады және жүйенің
жоғарғы мен төменгі деңгейіндегі мәселелердің шешімі бойынша жүзеге
асырылады.
V Технологиялық агрегаттарды дистанционды басқару.
VI Басқарылатын нысанды функциялау туралы жылдам графикалық,
сандық, мнемоникалық бейнелеу мәліметтері.
Есептік құжаттардың түрі мен құрамы қабылданған нормативті және
конструктивті құжаттармен анықталады.
Жоғарыда келтірілген функцияларды іске қосылатын кешен ретінде
қарастыруға болады.
ша деңгей — бұл мәліметтерді жинау және өңдеу, сонымен қата
6 MATLAB жобалау ортасында және есептеу барысында жүйені
орнықтылыққа зерттеу
2.6.1 Жүйеің есептеу барысында орнықтылыққа зерттеу
ЖЖО-ның екпінді қисығы келесідей ( 1- сурет)
2.5– сурет. Белгілі нысанның екпінді қисығы
46
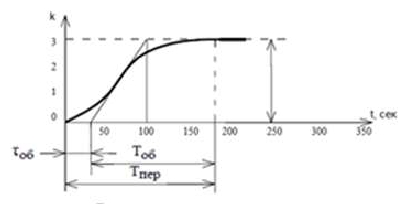
τоб – процесстың кешігу уақыты, Тоб процесстың тұрақты уақыты
Осыған қарап ЖЖО реттеуішті таңдаймыз
Объекттің 2.4 сурет бойынша алынған негізгі параметрлер мәндері:
Уақыт тұрақтысы — τоб сек, кешігу уақыты Тоб сек, күшейту
коэффициенті –коб . Осы шыққан мәндерден кешігу уақыты мен
уақыт тұрақтысы қатынасын анықтаймыз:
об
Tо
30
100
0,3
(2.1)
Осы кешігу уақыты мен тұрақты уақыт қатынасынан алынған мәннен
реттеуіштің түрін анықтауға болады.
2.8 к е с т е Реттеуіш түрін об
об
қатынасы бойынша таңдау
47
| об
об Формулсын ан алынған мән |
Нысан сипаттамасы | Реттеу заңы және
реттеуіш түрі |
|
| Кешігу мен
инерциясы |
Реттеудің дәрежесі | ||
| 0< τобТоб<0,05 | Кешігуі жоқ | Өте жақсы реттеледі | Релелі, үздіксіз, П-,
ПИ-, ПД-, ПИД- реттеуіштер |
| 0,05<τоб Тоб<0,1 | Үлкен
инерциямен және кішкентай кешігумен |
Өте жақсы реттеледі | Релелі, үздіксіз, П-,
ПИ-, ПД-, ПИД- реттеуіштер |
| 0,1<τоб Тоб<0,2 | Белгілі
транспортт ы кешігу |
Жақсы реттеледі | Релелі, үздіксіз, П-,
ПИ-, ПД-, ПИД- реттеуіштер |
| 0,2<τоб
Тоб<0,4 |
Белгіл
і транспортт ы кешігу |
Орташа
реттеледі |
Үздіксіз немесе
цифрлы, ПИ-, ПД-, ПИД-реттеуіш |
| 0,4<τоб Тоб<0,8 | Белгілі
транспортт ы кешігу |
Қиын реттелетін | Үздіксіз немесе
цифрлы, ПИ-, ПД-, ПИД-реттеуіш |
| 0,8<τоб Тоб<1 | Үлкен
транспортт ы кешігу |
Өте қиын реттеледі | Үздіксіз немесе
цифрлы, ПИ-, ПД-, ПИД-реттеуіш |
| τоб Тоб>1 | Үлкен
транспортт ы кешігу |
Өте қиын реттеледі | Цифрлы реттеуіш |
2.8 кестедегі
коэффициенттерге
қарай отырып реттеуішімізді
таңдаймыз. 0,2 < 0,3 < 0,4 табылған коэфициент осы диапазон арасында
турғанын байқаймыз. Жеке жылу орталығының процессіне қарай отырып ПИ —
реттеуіші таңдалынды.
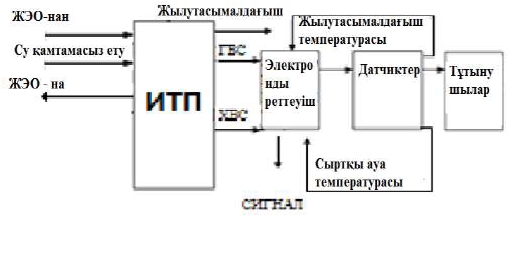
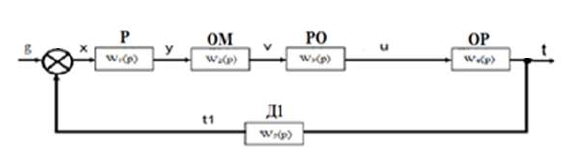
Жылуды реттеудің құрылымдық схемасы келесідей
2.6- сурет. Реттеу жүйесінің құрылымдық схемасы
Ғимаратты ыстық жылумен (t) жылытылады. Ғимараттағы орнатылған
температуралы датчиктерден электронды реттегішке сигнал (x) беріледі.
Реттеуіштен орындаушы механизмге (y) сигнал беріледі, орындаушы
механизм клапанды (v) сигнал беру арқылы ашып-жауып керекті температура
ұстап отырады.
Мұндағы:
Осы автоматты реттеу жүйесі реттеуіші ретінде пропорционалдық–
интегралдық ретеуішті (ПИ–реттеуіш) таңдадық.
ПИ реттеуішінің беріліс функциясы:
Wnu ( p) K p
1
Tu p
,
(2.2)
мұндағы Кр – реттеуіштің күшейту коэффициенті;
Ти – интегралдаудың уақыт тұрақтысы.
Орындаушы механизмнің беріліс функциясы келесідей
W ( p) k 2
1
T2 p 1 ,
(2.3)
мұндағы Т2 –электромеханикалық уақыт тұрақтысы.
Реттеу органы – реттеуші клапан. Клапанның беріліс функциясы
күшейткіш буын болап қарастырылады:
W(p)=k3 ,
мұндағы К3- күшейту коэффициенті.
48
(2.4)
Бұл жұмыста температураны реттеу нысаны ретінде жеке жылу
орталығы қарастырылды
Объекттің беріліс функциясы:
W * об ( р)
k w e p
TTP p 1
об
об р 1 ,
(2.5)
мұндағы, коб- объектның күшейту коэффициенті,
Тоб – объектның тұрақты уақыты,
τоб – кешігу уақыты.
Белгілі беріліс функциялар арқылы жүйенің
тұйықталған және
ажыратылған тізбектері үшін беріліс функциялары келесідей анықталынады.
Берілген әсер бойынша ажыратылған тізбек үшін беріліс функциясы:
W ‘ ( p ) W1 ( p ) W2 ( p ) W3 ( p ) W4 ( p ) ,
(2.6)
W ‘ ( p) (k1
1
T1 p
)
к 2
T2 p 1
к3
к 4
T4 p 1
ер
,
(2.7)
Берілетін әсер бойынша тұйықталған тізбек үшін беріліс функциясы:
W » ( p)
W ‘ ( p)
1 W ‘ ( p)W5 ( р)
,
(2.8)
W ‘ ‘ ( p)
) к3
T1 p T2 p 1 T4 p 1
) к3 к5
T1 p T2 p 1
(k1T1 p 1) k2 k3 k4 ер
T1 p (T2 p 1) (T4 p 1)
T1 p (T2 p 1) (T4 p 1) (k1T1 p 1) k2 k3 k4 ер k5
T1 p (T2 p 1) (T4 p 1)
(k1T1 p 1) k 2 k3 k4 ер
T1 p (T2 p 1) (T4 p 1) (k1T1 p 1) k2 k3 k4 ер k5
49
к е о б р
ер
(k1
1 к2 к4
1 (k1
1 к2
7
Жүйені орнықтылыққа зерттеу және ПИ-реттеуішінің
көрсеткіштерін анықтау
2.7.1 Жүйені орнықтылыққа зерттеу
Жүйенің орнықтылығы деп оның тепе –теңдік күйінен ауытқуына себеп
болған әсерді алып тастағаннан кейін, бастапқы орнықтылық қалпына оралу
қабілеттілігін айтады. Осы жұмыста жүйе орнықтылығын Михайлов
критерийі негізінде қарастырамыз. Бұл критерийдi А. В. Михайлов 1938 жылы
жариялаған. Ол сызықты тұйықталған автоматты реттеу жүйелерiн зерттеуге
арналған. Автоматты жүйелердiң орнықтылығын анықтау жүйенiң
сипаттамалық теңдеуiн талдауға негiзделген. Осы теңдеудің
түбiрлерiнде, оны былай жазуға болады
a0 p p1 p p2… p pn 0 ,
(2.19)-дегi р – ны jω – мен алмастырсақ, онда
G j a0 j p1 j p2… j pn. ,
рі
белгiлi
(2.10)
(2.11)
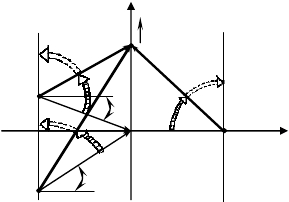
G( j )
сипаттамалық вектордың әр ( j pi ) көбейткiшi комплекс
сан болып табылады да, басы рі нүктесiнде, ал соңы жорамал осьтегi А
нүктесiнде болатын вектор түрiнде берiледi (2.7 суретті қараңыз). 0 -дан —
ке дейiн өзгерген кезде,
G( j )
сипаттамалық векторды
құрайтын
jV ( )
1
Р
А
( j p )
1
( j p )
( j p ) 3
2
3 ( )
Р
Х ( )
2 ( )
3
Р
2
векторлардың ұшы жорамал ось бойымен i ( ) аргументтi (фазаны) өзгерте
отырып, ығысады.
2.7 сурет – Сипаттамалық вектор жағдайы
Егер түбiр нақты сандар бойында жорамал осьтiң сол жағында
орналасса, онда өзгерiсi кезiнде ( j pi ) векторы сағат тiлiнiң бағытына
қарсы бұралады, оның аргументi оң, ал шектi мәні 2 -ге тең:
50
lim arg j pi
2
,
(2.12)
егер түбiр оң жақта орналасса, онда
lim arg j pi
2
,
(2.13)
Ал түбiрлер түйiндес, комплекстi ( p1 , p2 ) болса, онда әр түбiрдiң
векторы 2 және 2 бұрыштарына бұрылады, мұндағы -түбiрдiң
координат басынан абсцисса осi бойымен жүргiзiлген вектормен жасайтын
бұрышы (2.6 -сурет). Бұл векторлар аргументінің жалпы өсiмшесi 0 -ке
дейiн өзгергенде мынаған тең болады:
2
2
,
(2.14)
G( j )
сипаттамалық векторы комплекс сандардың көбейтіндiсi болып
табылады. Оларды көбейткенде аргументтер қосылады. Демек,
n
i1
(2.15)
Егер жорамал осьтің оң жағында “ l ” түбiрлер орналасса, онда сол
жағында (n l) түбiрлер болады, мұндағы n — теңдеулер дәрежесi. G( j )
вектордың қорытқы аргументi –
2
,
(2.16)
Барлық түбiрлерi жорамал осьтiң сол жағында орналасатын орнықты
жүйеге сәйкес келетiн G( j ) вектордың аргументi мынаған тең
2
,
(2.17)
жиiлiгiнiң өзгеруiне сәйкес G( j ) векторының шамасы мен бағыты да
өзгеріп отырып, оның ұшымен қайсыбiр қисық (годограф) сызылады, оны
Михайлов годографы
дейдi. Комплекстi айнымалы жазықтығында
орналасатын бұл қисықтың түрi бойынша орнықты ма, жоқ па екенiн
анықтайды.
Михайлов қисығын салу үшiн сипаттамалық теңдеуiндегi р -ның
орнына j -ны қояды да
n
n1
… an 0 ,
(2.18)
51
arg G j arg j pi;0 ,
arg G jn 2l ; 0
arg G j n ; 0
G j a0 j a1 j
G( j )
векторын нақты және жорамал бөлiктер түрiнде көрсетедi
G j X jY,
мұндағы
X an an2 2 an4 4 … ,
(2.19)
(2.20)
Y an1 an3 3 an5 5 ..
,
(2.21)
-ға 0-дан -ке дейiнгi аралықта әртүрлi мәндер бере отырып, Х ( )
мен Y ( ) -ның бiрқатар шамасын алады, ол
G( j ) векторының ұшының
координаттарын бiлдiредi. Осы нүктелердi өзара қосу арқылы Михайлов
годографын аламыз. Бұл қисық 0 кезінде әрқашан оң нақты осъте
Х ( ) ап , Y ( ) 0 нүктесiнде басталуы тиiс, ал шартын сақтау үшiн қисық
жазықтықтың
п квадрантын сағат тiлiнiң бағытына қарсы бiртiндеп,
координат басын баспай өтуi тиiс.
Егер зерттелетiн жүйе орнықсыз болса, онда бұрылыстың қорытқы
бұрышы п 2 -ден кем болып, годограф п квадрантты басып өтпейдi. 2.6
cуретте үзiк сызықпен орнықсыз жүйенің Михайлов годографы көрсетілген,
өйткені ол квадранттың бiрiнен (үшiншiсiнен) өтпейдi.
Орнықты жүйе үшiн п -шi квадрантта қисық шексiздiкке кетуi тиiс,
өйткені тек осы жағдайда ғана шарт орындалады. Сонымен Михайлов
орнықтылығының критерийi былай өрнектеледi: егер п -шi реттi АРЖ
орнықты болса, онда сипаттамалық вектор 0 -ден -ке дейiн өзгергенде п
2
бұрышқа бұрылуы тиiс, немесе 0 -ден -ке дейiн өзгергенде
Михайлов годографы оң нақты жарты осьтен басталып комллекстi
жазықтықтың п квадранттар санын сағат тiлiнің бағытына қарсы кезектеп өтуi
тиiс. Тұйықталған жүйенің беріліс фунциясы негізінде Михайлов критерийі
бойынша жүйе орнықтылығын анықтауға қажетті есептеулер жүргіземіз:
k4 ер T1 p (T2 p 1)
T1 p (T2 p 1) (T4 p 1) (k1T1 p 1) k2 k3 k5 k4 ер
0
T1 p (T2 p 1) (T4 p 1) (k1T1 p 1) k5k 2 k3 k 4 0
,
(2.22)
2 2 3 3
(T1T2 p 2 T1 p) (T4 p1) T1T2T4 p3 T1T2 p 2 T1T4 p 2 T1 p jT1T2T4 w3T1T2 w2 T1T4 w2
jT1w jT1T2T4w3 w2 (T1T2 T1T4 ) jT1w
52
p j , p , p j деп түрлендіріледі:
2.(k1T1 p 1)(k2k3k4k5 cos jk 2k3k4k5 sin ) ( jk1T1 1)(k2k3k4k5 cos
k 2k3k 4k5 cos jk 2 k3k 4 k5 sin jT1k1k 2 k3k 4 k5 cosk1k 2 k3k 4 k5 T1 sin
k 2 k 3k 4 k5 cos jk 2 k 3k 4 k5 sin
.
Беріліс функциясының жорамал бөлігі
k1k2k3k4kocT1 cos k2k3k4koc sin T1T2T4 3 T1 0 .
(2.23)
2.7.2 Реттеуіштің айнымалы шамаларын анықтау үшін есептеме жүргізу
Реттеуіштің беріліс функциясы:
Wnu ( p) K p
1
Tu p
,
(2.24)
2.9 кесте – Реттегіштің айнымалы шамаларын анықтау үшін Циглер –
Никлос әдісі
Өтпелі процесс типі
с
Ре
ттегіш
типі
Параме
трлері
min
0 %
апер қайта
иодты реттеу y2 dt
И-
Кр
5 A) *
1/(4,
1
/(1,7A)
/(1,7
1
A)
П-
Кр
Кр
В *
В
0,3
0,6
7 В
7 В
0,
0,
,9 В
,0 В
0
1
И-
ИД-
П
П
и
Кр
и
д
об
В
τоб
τоб
0,6
0,95
2,4
0,4
7 об
2 В
0 τоб
4 τоб
0,
1,
2,
0,
,0 об
,4 В
,3 τоб
,5 τоб
1
1
1
0
53
2
20 % қайта реттеу типін қолдана отырып (2.11 кестеде көрсетілген) ПИ–
реттеуіштің айнымалы шамаларын анықтаймыз.Алдымен реттеуіштің
күшейту коэффициентін анықтаймыз:
Кр = 0,7В ,
(2.35)
Реттеуіштің интегралдау уақыт тұрақтысы:
Ти = 0,7
об
,
(2.36)
Сонда реттеуіштің шамалары мынаған тең болады:
Кр = 3,234; Ти =4,62
2.7.3 Орнықтылықтың графикалық бейнесін құру
Жүйе орнықтылығын анықталған формулаларға қажетті нақты мәндерді
қою арқылы және реттеуіштің орнықтылық аймағындағы мәндерді қоя
отырып жүйенің орнықтылығын Михайлов критерийі негізінде анықтаймыз.
Соның нәтижесінде келесіні аламыз.
2.3 к е с т е — Нақты мәндер
Газ шығынының реттелуі
2.4
к е с т е — Нақты және жорамал бөліктер мәні
54
| w | P(w) | Q(w) |
| 0 | 0,6 | 0 |
| 0,05 | 0,592875 | 0,042234 |
| 0,1 | 0,571495 | 0,082875 |
| 0,15 | 0,53585 | 0,120329 |
| 0,2 | 0,48592 | 0,153004 |
| 0,25 | 0,42168 | 0,17931 |
| 0,3 | 0,343097 | 0,197658 |
| 0,35 | 0,25013 | 0,206463 |
| 0,4 | 0,142732 | 0,20414 |
| 0,45 | 0,020849 | 0,189111 |
| 0,5 | -0,11558 | 0,159801 |
| 0,55 | -0,26662 | 0,114637 |
| 0,6 | -0,43235 | 0,052055 |
| 0,65 | -0,61283 | -0,02951 |
| 0,7 | -0,80817 | -0,13161 |
| 0,75 | -1,01843 | -0,25579 |
| k
1 |
Т
1 |
k
2 |
T
2 |
k
3 |
k
4 |
T
4 |
K
5 |
τ |
| 3 | 1 | 0
,5 |
1 | 3 | 0
,1 |
2 | 1 | 3 |
Есептеулер нәтижесінде тұрғызылған Михайлов годографы келесідей
(2.8 суретте )
Mihailov godografi
0,3
0,2
0,1
0
mihailov godografi
-1,5
-1
-0,5
-0,1
0
0,5
1
-0,2
-0,3
2.8 — сурет. Михайлов годографы
Нәтижесінде жүйе орнықты, теңдеуіміз үш дәрежелі, Михайлов
годографы квандранттар санын сағат тілінің бағытына қарсы кезекпен өтіп
жатыр.
2.7.4 ЖЖО температурасын реттеудің MATLAB жобалау ортасында
орнықтылыққа зерттеу.
MATLAB жобалау ортасы
Matlab
—
бүгінгі таңдағы кең таралған, автоматтандырылған
математикалық есептеулер жүйесі. Онда көптеген математикалық есептеулер
тек дайын функцияларды пайдалану жолымен шешіледі. Бұл жүйе жалпы
матрицаларға амалдар қолдануға негізделгендіктен оның аталуы «MATrix
LABoratory», яғни «матрицалық лаборатория» сөзінен келіп шыққан. Бұл
жүйе 70 – жылдарда С.В.Молер тарапынан ойлап табылған және ол сол кезде —
ақ үлкен есептеу машиналарында қолданыла бастаған. Ал 80 – жылдардың
басында MathWorks. Inc фирмасында Джон Литтл IBM PC Macintosh дербес
компьютерлер үшін PC Matlab версиясын жасады.
Matlab бүкіл адамзат тарихындағы математикалық есептеулер
саласындағы барлық әдістерді қамтиды және күшті есептеу жүйесі болып
табылады. Бұл жүйенің артықшылығы, яғни құрамына енетін функцияларды
(мәтін түрінде жазылған М — файлдар және С түрінде жазылған бағдарламалар
арқылы) өзгертуге, қосымшалар енгізуге болады. Сондай — ақ сандық
есептеулерден басқа графикалық функциялармен (екі өлшемді, үш өлшемді)
орындауға болады.
Matlab жүйесінің мүмкіндіктері өте үлкен және оларды толық сипаттап
жазу қиынға түседі. Сол себепті олардың тек негізгі, көп қолданылатын
мүмкіндіктерін атап көрсетеміз.
1.
Математикалық есептеулер саласында: матрицалық, векторлық,
логикалық операциялар; элементарлық және арнаулы функциялар.
55
2.
Сандық әдістер саласында: дифференциялдық теңдеулерді шешу;
интегралдарды есептеу, сызықтық емес алгебралық теңдеулер түбірін табу;
бірнеше айнымалы функцияның минумымын табу; бір немесе көп өлшемдік
интерполяция.
3.
Бағдарламалау саласында: 500-ден астам математикалық
функциялар; екілік және мәтіндік файлды ендіру және шығару; С және
Фортран тілінде жазылған бағдарламаларды пайдалану; Matlab тілінде
жазылған бағдарламаларды С және С++ тілдеріне автоматты түрде өткізу.
4.
Визуалдау және графика саласында; екі және үш өлшемдік
графиктер сызу; мәліметтерді визуалдық сараптама жасау және анимация.
5.
Matlab мүмкіндіктерін кеңейтетін қосымша пакеттер. Simulink —
виртуалдық приборларды пайдаланып процестерді модельдеу; математикалық
есептеу пакеттері; сигналдар мен кескіндерді өңдеу пакеттері; қаржылық
есептеулерді шешу; карталар мен географиялық мәліметтермен жұмыс істеу.
Бұл қосымша пакеттері.
Matlab әртүрлі пайдаланушыларға әртүрлі облыстарда
математика, машина жасауда және ғылыммен жұмыс жасауда стандартты
аспап ұсынады.
2.7.5 Simulink пакеті ортасында жүйені орнықтылыққа зерттеу
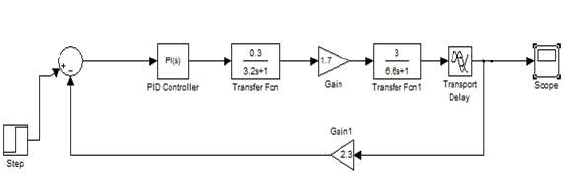
2.9-сурет. Жеке жылу орталығының температурасын реттеу нақты
модельдерінің бейнесі
Мұндағы:
Step – сатылы сигнал генераторы, PI controller – біздің
таңдаған ПИ реттеуішіміз , transfer fcn – орындаушы механизм , Gain –
реттеуші клапан, transfer fcn1 және transport delay реттелетін объект, Gain1,2 –
температура датчиктері , Scope – виртуалды осцилограф.
56
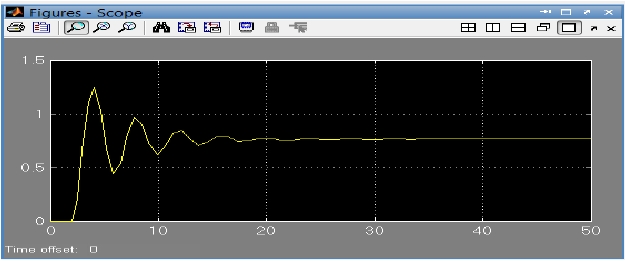
Scope виртуалды осцилограф
арықылы біз жүйенің келесідей
орнықтылығын көре аламыз.
2.10 – сурет. Жүйенің орнықтылық көрінісі.
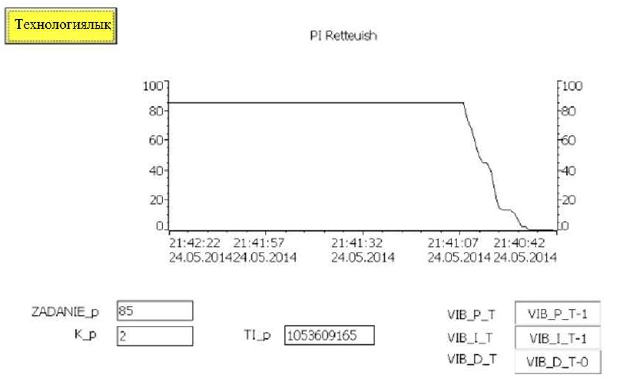
8 SCADA ProToolPro6.0 программасының негізінде жеке жылу
орталығының визуалды көрінісі
2.11 – сурет. Жүйенің визуалды көрінісі.
57
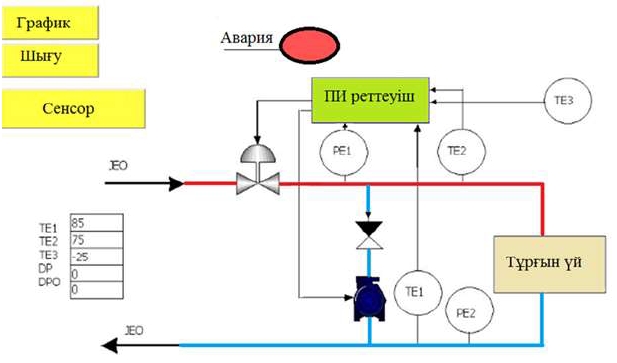
ПИ реттеуішіне 85 градус ұстап тұру бұйрығы
2.12 – сурет. ПИ реттеуішінің берілген температураны ұстап тұрған
көрініс графигі .
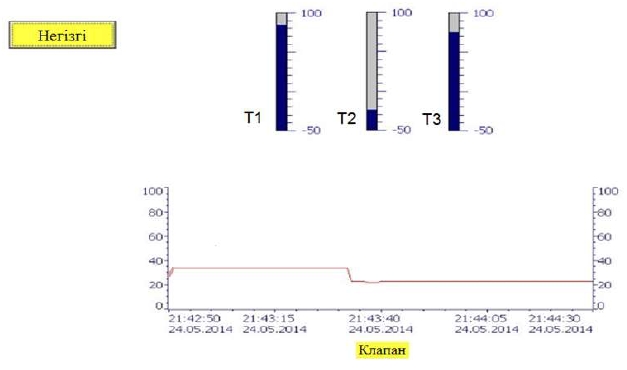
2.13 – сурет. Клапанның температураның өзгеруіне байланысты өзгеріс
графигі